
При размещении скачанных фото на других ресурсах пожалуйста указывайте источник.
Обратная связь, вопросы, пожелания через Форум
Частная обсерватория "Звездное озеро" |
||
Галерея Оборудование |
||
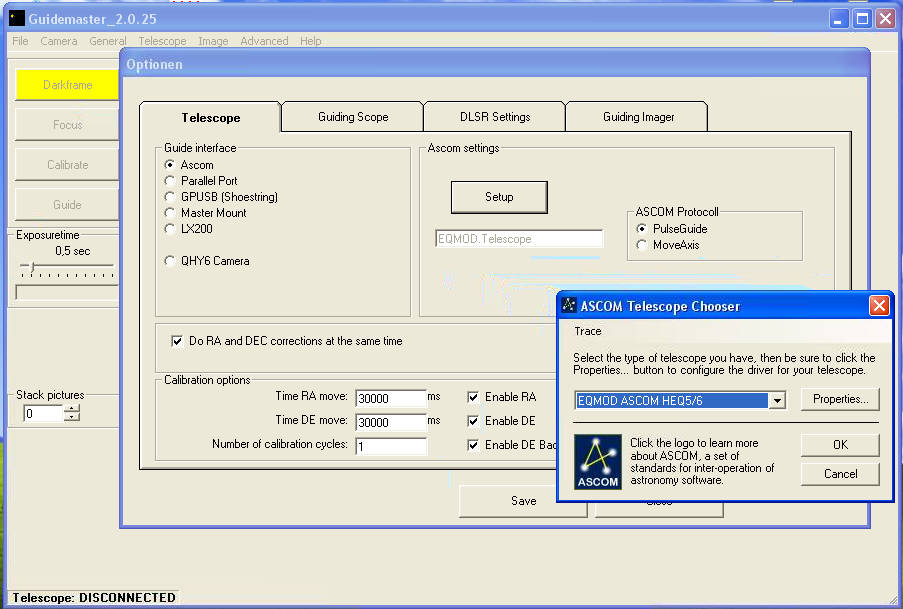
Измерение параметров монтировки, анализ и методы улучшения параметровК написанию данной статьи подтолкнули частые вопросы о качестве экваториальных монировок. Не смотря на серийное производство качество ведения у двух экземпляров из одной партии могут сильно отличаться. Виной тому мельчайшие огрехи в обработке шестеренок, моторов и главной червячной пары. Без инструментального контроля, на глаз, как правило не удается улучшить параметры ведения. Часто читаю, что после пересмазки ведение улучшилось. Вопрос: на сколько улучшилось и в каких единицах? Для понимания процесса нам придется немного окунуться в математику. При съемке с длинными выдержками существуют два параметра монтировки влияющие на качество снимков. Главный параметр это отклонение скорости монтировки от истинной. Измерять отклонения скорости сложно да и не требуется. Об изменении скорости можно судить по углу на который монтировка отклоняется от точки на которую наведен телескоп. Этот угол не зависит от фокуса телескопа и напрямую связан с механикой. Далее мы разберем как его измерить и проанализировать. Второй параметр монтировки который нам будет интересен - это время за которое преодолевается зазор в шестеренках и червячной паре на оси DEC при смене направления гидирования. Для RA этот параметр неактуален потому что монтировка в режиме слежения и гидирования на меняет направление и шестерни находятся в постоянном зацеплении в одну сторону. Для нашей работы нам понадобятся: 1 Экваториальная монтировка с возможностью гидирования 2 Любой телескоп. Короткофокусную оптику типа фотообъективов не рекомендую использовать по причине малого разрешения. 3 Камера сопряженная с нашим телескопом. Подойдет любая с возможностью съемки с фиксированными выдержками (не автомат). Например QHY5/6 4 Компьютер с Windows 5 Бесплатная программа для гидирования Guidemaster, скачать тут или программа MaximDL. 6 Бесплатная программа PECPREP для анализа лога гидирования . Скачать тут Устанавливаем программы. В Guidemaster Подключаем монтировку и камеру. В моем примере будет использоваться монтировка SW HEQ6Pro с установленными ремнями вместо пром.шестерни и камера QHY6.
После всех настроек Guidemaster предложит перезапуститься. После перезапуска должна автоматически заработать камера, вам останется сделать Connect к монтировке. Устанавливаем минимально возможную выдержку 0,3 сек и ищем звезду. При такой выдержке подойдет звезда 4-5 величины. Особо яркие звезды брать не стоит из за неточного опредения координаты по пережженому центру. Пред всеми процедурами не забываем настроить полярную ось монтировки с максимально возможной точностью, звезда не должна плыть на экране, ни какие варианты привязки по 3-м, 2-м звездам не делать это важно! Следующим этапом необходимо сделать каллибровку, для чего нажимаем соответствующую кнопку. Некоторое время сетап будет занят, возможно высветится окно, что беклеш более 1 сек (OK), после чего откроется окно похожее на следующее.
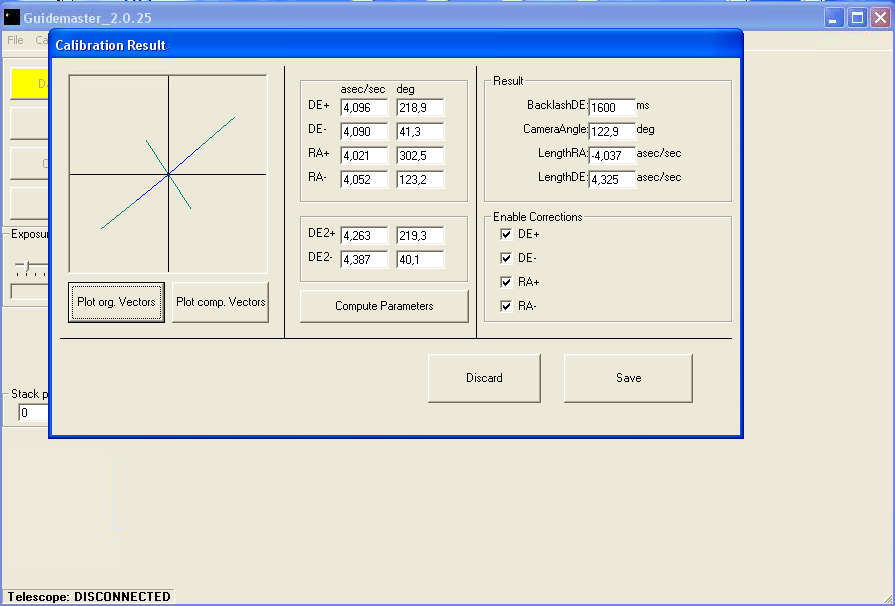
Обращаем внимание на вектора, они должны образовать крест с углом 90гр. Лучи могут быть разные по длине, но угол должен сохраняться. Если вы не получили подобной картинки, то стоит провести каллибровку заново. Вот тут мы получили важный параметр Backlash DEC выраженный в милисекундах. Это время необходимое монтировке для преодоления зазоров шестеренок и червячной пары на оси DEC. В идеале необходимо настроить монтировку так, что бы это время было минимальным. По сути этот параметр показывает через какое время монтировка начнет реальную коррекцию положения по DEC, при больших значениях, при гидировании возможен сильный уход (ошибка) что скажется на форме звезд. Минимизируется это уменьшением зазоров в шестернях и зазора в червячной паре DEC. Если предыдущие шаги выполнены то устанавливаем звезду в центр кадра и запускаем гидирование (на картинке звезда с краю кадра всего лишь для примера). Сразу же отключаем галку Activate Guiding переводя монтировку в режим "свободного плавания" и включаем галку Write to file. Выбираем удобное для файла место OK. Все, пошла запись лога. Хочу отдельно описать процесс получения и загрузки лога в PECPrep из наиболее популярной программы управления сетапом MaximDL. Для начала необходимо выставить экспозицию гида 0.3 сек и откалибровать гид. По-скольку выдержка короткая, то стоит выбрать звезду, которую гид уверренно видит. Далее установить агрессивности по обеим осям 0 (ноль). Повторюсь, что для такого ведения без коррекции необходимо тщательно настроить полярную ось во избежании ухода звезды из поля зрения камеры. В качестве дополнительной меры можно установить расширенное поле слежения для гидируемой звезды на вкладке Guide -> боковое меню Options ->Track Box Size. Следующим шагом в том же меню Options установить галку на разрешение записи лога (Enabled) и выбрать место куда будет писаться файл (Set Tracking Log...). В случае если лог писался до этого момента, стоит выбрать иное имя лога, специально для нашего анализа. После этого можно запускать гидирование. В процессе гидированиия не рекомендую открывать файл лога в течении сессии. Просмотровые редакторы блокируют файл и MaximDL перестанет писать. Дождитесь окончания процесса. Далее запускаем программу PECPrep, в настройках выбираем тип монтировки, тип лога. Для лога из Guidemaster не возникает проблем с чтением. Для MaximDL откроется окно, в котором необходимо корректно заполнить все строки. 1 Все дробные значения заносятся с разделителем "запятая", программа не понимает разделитель "точка" и уходит в ошибку. 2 Запишем фокусное гида, барлоу/редьюсер фактор - 1, ниже требуется указать размер пикселя на камере гида (ищем информацию по вашей камере и матрице), следом заносим биннинг (как правило 1), параметр Camera Angle (deg) берем в MaximDL на вкладке Guide -> Settings (знак важен). Нижние две галки и поле не заполняем. Нажимаем OK. 3 В открывшемся окне выбираем записанный файл лога.
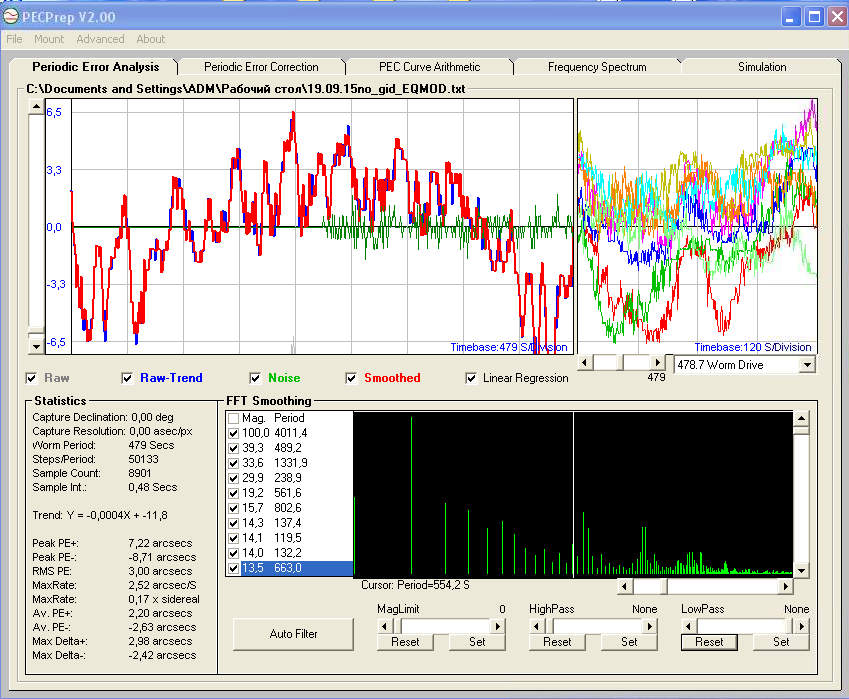
Сразу хочу предупредить, что нам потребуется не менее 5-6 периодов обращения червяка, то есть лог должен писаться не меньше чем 40 минут (чем больше тем лучше). Если помните то было условие точной полярной оси, при большой ошибке полярной оси звезда за 40 мин просто уплывет из видимости телескопа. Первая картинка выглядит так:
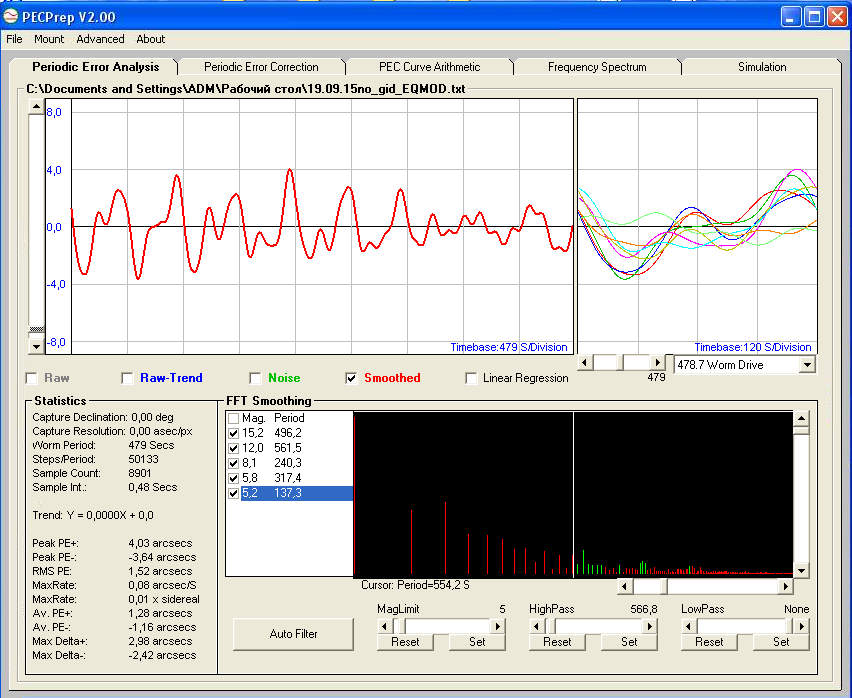
Убираем все галки под графиком кроме Smoothed и нажимаем Auto Filter. Из графика убираются случайные шумы связанные с атмосферой, график выравниваеттся относительно оси. По размаху графика можно судить на сколько угловых секунд монтировка уходит от истинного движения.
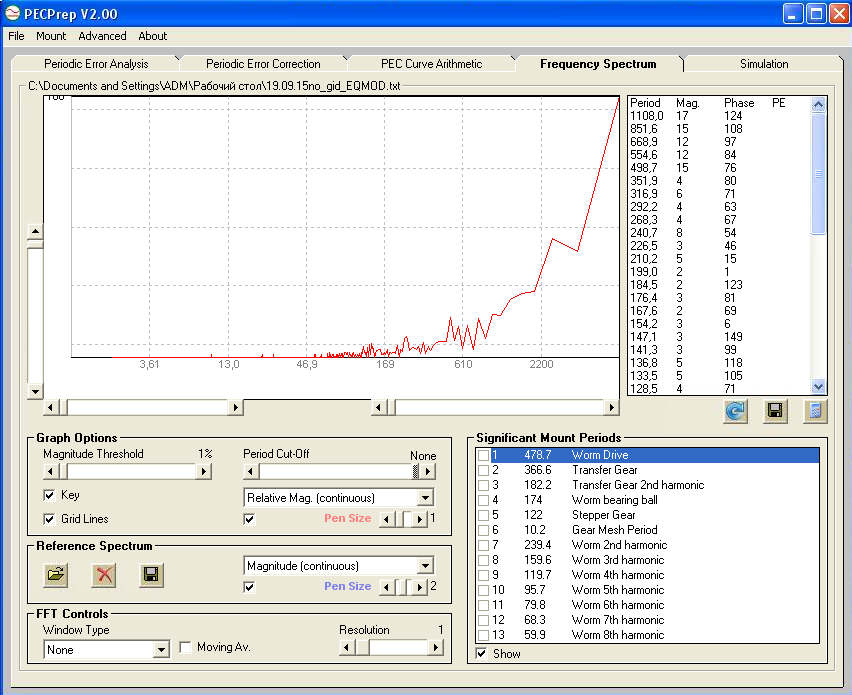
В конктретном случае монтировка уводит телескоп на 3.5-4 уг сек. В вашем случае, если монтировка не настраивалась ошибка может быть и 10 и 20 и30 уг сек Теперь перейдем на вкладку Periodic Error Correction, в нижней части Cycle Weightings показывает сколько циклов использовалось для анализа, повторюсь что чем больше циклов тем лучше, но не менее 5. Перейдем на вкладку Frequency Spectrum :
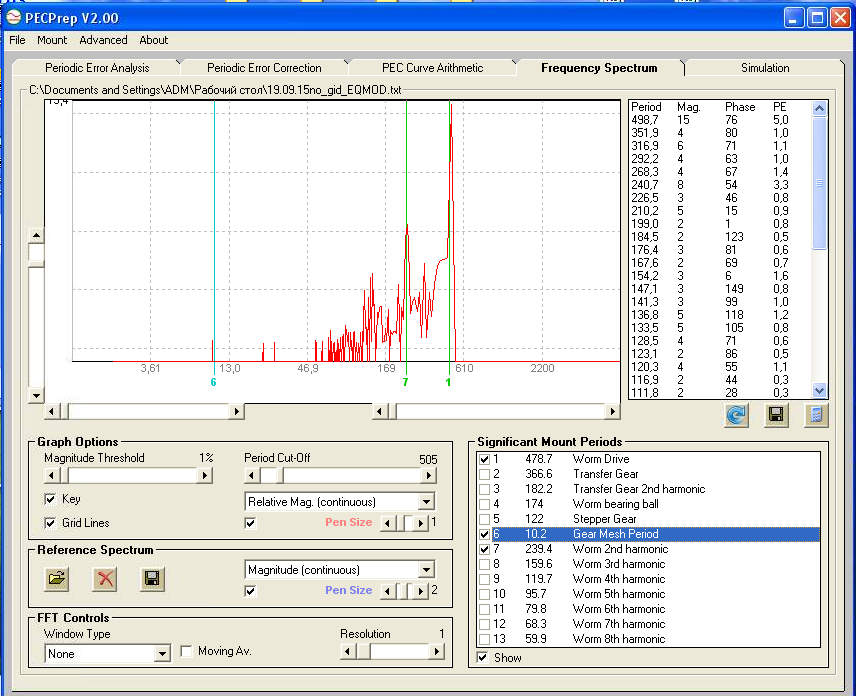
Приведем график спектра к читабельному виду. Выставим ползунок Period Cut-Off несколько больше чем значение Worm Drive, этим мы отрежем длинные гармоники, которые не зависят от механики и увеличим масштаб движком слева от гарфика. Далее движком Magnitude Threshold отрезаем незначащие гармоники и шум. Следующим шагом нажимаем кнопку калькулятора справа и после расчета видим вклад каждой гармоники в общую неравномерность движения монтировки. В нижней правой части окна даны подсказки какие гармоники от чего зависят. Расставляя галки на графике будут появляться метки и если метка совпала с горбом то можно уже говорить о конкретном узле монтировки. Worm Drive - червячная пара, как правило самая большая гармоника, но поскольку она имеет длительность 478 сек, то гид ее легко погасит. Уменьшить эту гармонику можно подбором зазора в червячной паре, огромное значение играет притирка пары. Transfer Gear - промежуточная шестерня, ее период меньше 366 и вместе со следующей 2ой гармоникой 182 шестерня уже начинает влиять на ведение при гидировании. Если в списке расчета эта гармоника имеет большую величину то шестерня требует регулировки. Как правило уменьшить ее какими либо настройками трудно. Worm bearing ball 174сек - отвечает за качество подшипников в которых вращается червяк. При большом значении необходимо либо отрегулировать зажим подшипников либо заменить их. Stepper Gear 122сек - по сути это овальность шестерни мотора. Gear Mesh Period 10сек - самая неприятная гармоника перекатывания зубов шестерен, она практически не компенсируется гидом. Частично бороться с ней можно подбирая зазор в шестернях, более радикльное средство замена шестеренок на ремни.
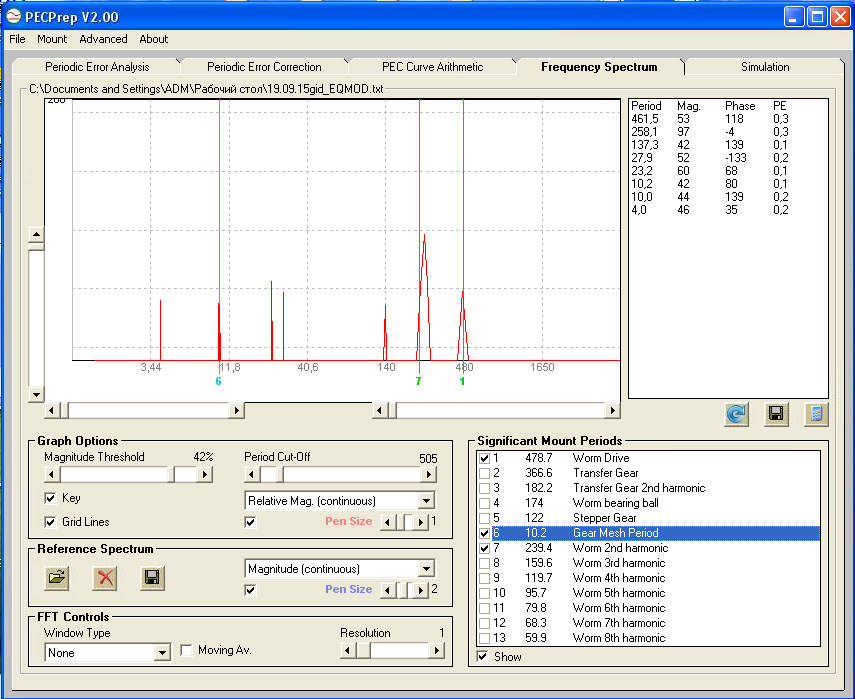
На моем графике видно, что реально 3 гармоники оказывают влияние на ведение монтировки. Длинно-периодические гармоники не страшны поскольку скомпенсируются гидом, самая короткая "бросает" телескоп всего на 0,3 уг сек (в расчете не видно, она в самом низу), для меня это приемлимое значение. Собственно оcтался последний эксперимент который мы можем провести. Предлагаю посмотреть какие гармоники останутся после включения гидирования. Так же как и в описанной последовательности снимается характеристика, но включен режим гидирования.
Отлично видно что все гармоники не превышают 0.3 уг сек. | ||